|
Kleine ATC - Weisheiten ( 1 ) |
Vorwort Dies ist der Beginn einer kleinen Serie über Dies und Das der Flugsicherung. Animiert durch viele Fragen meiner Kollegen möchte ich einen Teil des Know-How weitergeben. Sicherlich sind es nur Kleinigkeiten, die unseren fliegerischen Alltag bestenfalls tangieren, aber die eine oder andere interessante Neuigkeit ist hoffentlich für Sie dabei. Zwar ist es bestimmt nicht überlebenswichtiges Wissen, trotzdem lässt sich damit hier und da eine Ungereimtheit vielleicht ausräumen. Gedacht hatte ich mir eigentlich kleine, handliche Häppchen zu reichen, sozusagen ATC-Canapés, die leicht verdaulich auch Lust auf mehr machen. Deswegen versuche ich den Umfang von zwei DIN A4-Seiten nicht zu überschreiten und bitte um Entschuldigung wenn mir dies, vermutlich schon im ersten Teil, ab und an nicht gelingen sollte. In loser Folge geplant sind folgende Themen:
(1) Radar und Radardatendarstellung - Welche Informationen stehen dem Lotsen am Radar zur Verfügung und welche davon darf er für die Staffelung anwenden. (2) Grundlagen der Staffelung - Der Weg vom Flugplan zur Clearance. Wie wird vom Lotsen ein potentieller Conflict analysiert und gelöst (3) Kritische Windprofile - Die kleinen, natürlichen Bosheiten, die einem „Director" das Leben schwer machen. (4) Wenn es Nacht wird über Deutschland - Eine Nachtschicht bei Rhein Radar in Karlsruhe mit Nachbetrachtung des Bodenseeunfalles. (5) SIDs contra Lärm - Des einen Freud, des andern Leid. Abflugrouten im Spannungsfeld von Pilot und Anwohner. Radar Die Erfindung aus der Zeit des zweiten Weltkrieges ist heutzutage aus der Luftfahrt nicht mehr wegzudenken. Primärradar, ( RADAR = Radio detection and ranging ) bedient sich des Echos eines Hochfrequenzpeilsstrahls, der von genügend großen Objekten reflektiert wird. Manchmal reicht dazu auch ein LKW, der auf der Autobahn über eine Bergkuppe fährt. Dies kennen gerade die Frankfurter Approacher aus leidiger Erfahrung, können sie doch manchmal den Verkehr auf der A3 „online" mitverfolgen. Um nun den Bildschirm nicht unnötig vollzumüllen, werden bei den Lotsenarbeitsplätzen die quasistationären Ziele, also sich sehr langsam bewegende Objekte, ausgeblendet. Dies kann allerdings auch dazu führen, dass z.B. das Primärecho eines Hubschraubers im Schwebeflug vom Rechner unterdrückt wird. Momentan sind bei der DFS so viele Anlagen in Betrieb, dass eine 100%ige Abdeckung gewährleistet ist. Das heißt mindestens eine Primärantenne erfasst Ihr Flugzeug immer. Die Reichweite dieser Antennen variiert zwischen 60nm bei schnell drehenden „Approach-Antennen" mit einer Umlaufzeit von 5s und 120nm bei „Center-Antennen", welche etwa halb so schnell drehen. Die Drehzahl der einzelnen Antennen ist ursächlich dafür, wie schnell ein neues Positionsupdate am Radarschirm zur Verfügung steht. Das zweite System ist das Sekundärradar. Dieses wird momentan umgerüstet um auch Signale der Mode-S-Transponder zu verarbeiten. Die Datenwortbreite von Mode-S ist mit 56bit bzw. 112bit groß genug, um zahlreiche Informationen vom Flugzeug zum Boden zu übertragen. Im Rahmen dieser Entwicklung kann man auch darüber nachdenken, ob nicht etwa bei einer TCAS-RA die Richtung des RAs ( Climb, Descent ) oder auch die am Autopiloten selektierte Flughöhe verzögerungsfrei an die ATC-Stelle übertragen und am Radarschirm zur Anzeige gebracht wird. Dies würde evtl. dazu beitragen, dass in Zukunft gegensinnige Anweisungen von ATC und TCAS vermeidbar sind. Die allererste Sekundärantenne, welche auch in der Lage ist, Mode-S-Signale zu verarbeiten, befand sich bis Anfang Mai in der Evalierungsphase nach der erforderlichen Flugvermessung. Sie wurde, wenn alle Tests erfolgreich verliefen, in den letzten Tagen in Betrieb genommen. Es ist die südliche Platzradarantenne, des Frankfurter Approach-Luftraumes. In Deutschland arbeiten flächendeckend Sekundär-Anlagen. Die Antennen haben eine mittlere Reichweite von 150-200nm und sind so verteilt, dass ein Flugzeug an seiner Position immer von mehreren Peilstrahlen erfasst wird. Im grenznahen Bereich erhält die DFS darüberhinaus Daten von Radaranlagen der Nachbarländer . So wird sichergestellt, dass die einzelnen Flugzeuge immer von zwei bis fünf Antennen mehr oder minder gleichzeitig erfaßt werden. Da nun die Peilinformationen nicht alle zur gleichen Zeit zur Verfügung stehen, müssen die ermittelten Werte erst noch mit den Ergebnissen der anderen Antennen synchronisiert werden. Dazu enthält jedes Datenpaket neben Richtung und Distanz auch einen Zeitstempel. Über verschiedene Algorithmen wird daraus, ähnlich wie bei Flugzeugen mit mehreren Navigationseinrichtungen, eine Art Triple-Mix-Position bestimmt. Bei älteren Systemen der DFS verwendet der Rechner auch die zuvor errechneten Positionsdaten und führt mit diesen eine Plausibilitätskontrolle durch. Dabei wird mit Hilfe von Kurs und Geschwindigkeit des Flugzeuges untersucht, ob die neu errechnete Position auch Sinn macht. Diese Berechnungsmethode wird "plotting" genannt. Gerade bei sich überlappenden Zielen ist diese Aufgabe nicht immer ganz einfach und es kommt auch schon mal vor, dass das Callsign-Label dem Nachbarziel zugewiesen wird.Bei den modernen Systemen mit Informationen von mehreren Sekundärantennen muß diese Plausibilitätskontrolle nicht mehr durchgeführt werden, da durch das Multi-Radar-Tracking eine deutlich höhere Zuverlässigkeit bei der Positionsbestimmung erreicht wird. Die horizontale Auflösung der Anlagen erreicht dabei in 95% aller Fälle eine Genauigkeit von ca. 0,5nm, jedoch nie mehr als 1nm. Wofür verwenden nun die Lotsen das Radar ? Wie in Deutschland üblich, ist auch diese Aufgabe in einer Vorschrift hinterlegt. Nämlich im Kapitel „General Radar Procedures" des Lotsen OM-A. BAVK 420 General Radar Procedures 421 Use of Radar 421.1 Radar shall be used by an ATC unit to: .11 provide separation; .12 monitor and vector aircraft; .13 expedite the flow of air traffic; .14 assist pilots in circumnavigating areas of adverse weather, in solving navigational problems, in special situations and by issuing traffic information. 421.1 Radar vectoring shall not be terminated before it is assured that the pilot is able to continue his flight on his own navigation
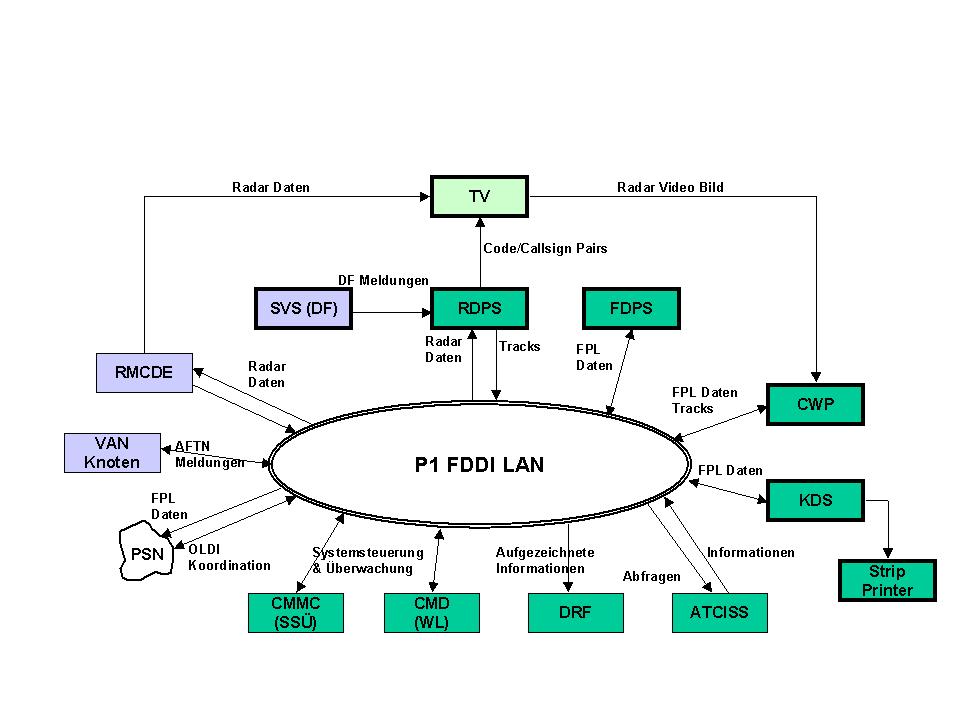
Nun wollen wir aber einen Blick auf das System werfen, das den Lotsen zur Verfügung steht. Zwar arbeiten einige Kontrollzentren der DFS immer noch mit Anlagen aus den 70er Jahren, genannt DERD-(A)X(L) aber so nach und nach werden die Regionalstellen auf P1 umgerüstet. Die Radarzentrale Langen, mittlerweile ist Düsseldorf integriert, arbeitet schon seit knapp zwei Jahren mit dem neuen System. In München wird es voraussichtlich zum Ende des Jahres in Betrieb gehen und auch in Bremen ist die Installation bereits geplant. Leider gibt es immer noch kleine Hindernisse. So konnte z.B. bisher das P1-Düsseldorf nicht mit dem P1-Langen auf elektronischem Wege koordinieren. Das heißt die Lotsen mussten bei Sektor-überschreitendem Verkehr zwischen Langen und Düsseldorf immer noch manuell koordinieren. Mittlerweile sind aber diese beiden Systeme miteinander verschmolzen. Dafür "redet" P1-München noch nicht mit P1-Langen. Innerhalb einer Kontrollzentrale geht’s zwar und die Systeme sind auch in der Lage, flugsicherungsrelevante Daten auszutauschen. Allerdings bieten sie im „innerdeutschen Grenzverkehr“ nicht die "Komfortfunktionen", die regional zur Verfügung stehen. Gründe dafür sind durch Rechnerleistung begrenzte Kapazität, Vorgaben zu Redundanz und Ausfallsicherheit und örtliche Unterschiede bei den UNIX-Systemen. Meines Erachtens irgendwie komisch, daß zwei eigentlich identische Systeme, nicht in der Lage sind, wichtige Flugsicherungsdaten untereinander auf elektronischem Wege auszutauschen. Gerade die aufwendige Koordination ist oft der Hauptgrund, daß viele unserer Requests nicht erfüllt werden. Trotzdem ist das P1 ein deutlicher Entwicklungsschritt nach vorne. Folgende Grafik zeigt einen Überblick über die Systemstruktur des P1-LAN (Local Area Network). |
|
|
 |
Die Darstellung der Radardaten Sie waren sicherlich schon mal zu Besuch in einem Kontrollraum. Von daher dürfte das folgende Bild nichts Neues für Sie sein. |
 |
USE OF SSR MODE C READOUTS
Im Prinzip müssen die Lotsen die Targets auf dem Bildschirm „nur" soweit auseinanderhalten, daß sie die Minimalstaffelung nicht unterschreiten Radar separation based on the use of RPS and/or PSR blips shall be applied so that the distance between the centres of the RPSs and/or PSR blips, representing the positions of the aircraft concerned, is never less than a prescribed minimum. ( RPS - Radar Position Symbol, PSR blip - Primary Surveillance Radar blip = Primärziel, d. Verf.) Dass das nicht ganz so einfach ist, wie sich viele von uns vorstellen ist aber Thema der nächsten Folge. Dann werde ich versuchen, den Gedankengang eines Lotsen vom Erhalt der Kontrollstreifen bis zur Aussprache der Clearance in nachvollziehbarer Weise transparent zu machen. So, damit wären wir am Ende des ersten Teils, hoffentlich war‘s nicht zu langweilig, so daß Sie schon Lust auf die nächste Ausgabe haben. In der werden wir dann mal wirklich staffeln. (Bildquelle&Vorschriften: DFS)
|
|
|